- 具身智能/机器人/ROS
- AI人工智能/大模型
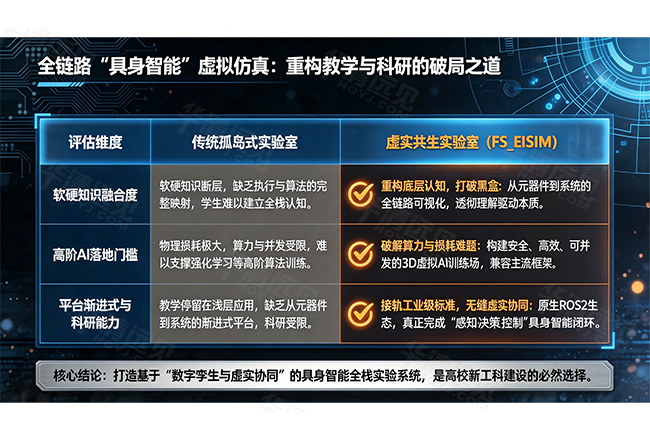
- 虚拟仿真系统
- 物联网
- 嵌入式
- 行业应用实训
- 工控板
具身智能机器人















智能感知与交互套件


边缘计算与嵌入式AI平台

AI行业应用实训平台





大模型与AI教学实验系统




嵌入式虚拟仿真

物联网虚拟仿真










物联网基础教学实验箱
.png) 物联网综合实验箱(FS_WSN3399CH/CHJ)
物联网综合实验箱(FS_WSN3399CH/CHJ)
-
物联网综合实验箱(FS_5G3399CH/CHJ)
-
 物联网综合实验箱(FS_WSN6818CH)
物联网综合实验箱(FS_WSN6818CH)
 物联网综合实验箱(FS_WSN4412CH/CP)
物联网综合实验箱(FS_WSN4412CH/CP)
 智能传感器实验平台(FS_ISensor)
智能传感器实验平台(FS_ISensor)
 RFID教学实验箱(FS_RFID)
RFID教学实验箱(FS_RFID)
 RFID嵌入式教学实验箱(FS_RFID_B)
RFID嵌入式教学实验箱(FS_RFID_B)
 NB/LoRa物联网开发套件(FS_LPWAN_B)
NB/LoRa物联网开发套件(FS_LPWAN_B)
- NB-IOT无线传感网实验箱(FS_NBIOT_B)
-
LoRa无线传感网实验箱(FS_LoRa_B)
 WIFI无线传感网实验箱(FS_WIFI_B)
WIFI无线传感网实验箱(FS_WIFI_B)
-
Zigbee无线传感网实验箱(FS_Zigbee_B)
-
蓝牙BLE无线传感网实验箱(FS_BLE_B)
-
IPV6无线传感网实验箱(FS_IPV6_B)
-
 鸿蒙星闪实验箱(FS_Hi3863)
鸿蒙星闪实验箱(FS_Hi3863)
















嵌入式AI实验箱
Android实验箱

嵌入式虚拟仿真系统



RISC-V实验箱


行业应用实训套件/实训台/沙盘
VR/AR行业应用实训套件







 人工智能实验室
人工智能实验室 物联网实验室
物联网实验室 嵌入式实验室
嵌入式实验室 15711386993
15711386993